The QGyroscopeReading class represents one reading from the gyroscope sensor. 更多...
| 头: | #include <QGyroscopeReading> |
| CMake: |
find_package(Qt6 COMPONENTS Sensors REQUIRED)
target_link_libraries(mytarget PRIVATE Qt6::Sensors) |
| qmake: | QT += sensors |
| Since: | Qt 5.1 |
| 继承: | QSensorReading |
| void | setX (qreal x ) |
| void | setY (qreal y ) |
| void | setZ (qreal z ) |
| qreal | x () const |
| qreal | y () const |
| qreal | z () const |
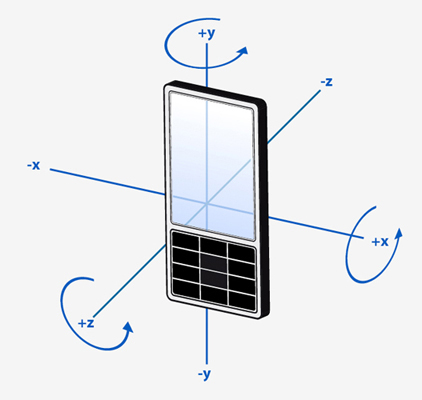
The reading contains 3 values, measured in degrees per second that define the movement of the device around the x, y and z axes. Unlike QRotationReading , the values represent the current angular velocity rather than a fixed rotation. The measurements are in degrees per second.
[read-only]
x
: const
qreal
This property holds the angular velocity around the x axis.
Measured as degrees per second.
访问函数:
| qreal | x () const |
另请参阅 QGyroscopeReading Units .
[read-only]
y
: const
qreal
This property holds the angular velocity around the y axis.
Measured as degrees per second.
访问函数:
| qreal | y () const |
另请参阅 QGyroscopeReading Units .
[read-only]
z
: const
qreal
This property holds the angular velocity around the z axis.
Measured as degrees per second.
访问函数:
| qreal | z () const |
另请参阅 QGyroscopeReading Units .
Sets the angular velocity around the x axis to x .
另请参阅 x ().
Sets the angular velocity around the y axis to y .
另请参阅 y ().
Sets the angular velocity around the z axis to z .
另请参阅 z ().